
自动驾驶中的“冗余”
L3及以上,自动驾驶系统负责,尤其是车端无人的情况下,也只能有自动驾驶系统负责,此时如果电子系统A失效,车辆将失控(无人接管),因此诞生了引入电子系统B的需求,即冗余备份。ADS Sensor的冗余,通常是采用多种传感器的备份来实现,Radar/Camera双重覆盖,鲁棒性大大提升,定位层面也可以采用GNSS定位+感知环境重构的定位冗余。两套电机,两套电源以及两套绕组的双EPS转向冗余,相当于完全
自动驾驶中的“冗余”_汽车技术__汽车测试网 (auto-testing.net)
为什么需要冗余?
-起源于驾驶责任的划分
-L2及以下电子系统仅提供辅助功能,驾驶主体在驾驶员,当电子系统失效驾驶员可以通过机械系统直接操控来接管车辆。例如:博世的IPB具有机械备份制动。转向EPS系统是非解耦系统,助力失效后,还可以用纯机械方式无助力的进行转向操作。
-L3及以上,自动驾驶系统负责,尤其是车端无人的情况下,也只能有自动驾驶系统负责,此时如果电子系统A失效,车辆将失控(无人接管),因此诞生了引入电子系统B的需求,即冗余备份。
冗余的范围?
-控制器冗余(大脑)
-感知定位冗余(环境监控)
-执行器冗余(制动、转向)
-通讯冗余(控制信息传递)
-电源冗余(支撑失效降级)
常用冗余策略?
-控制器冗余(大脑)
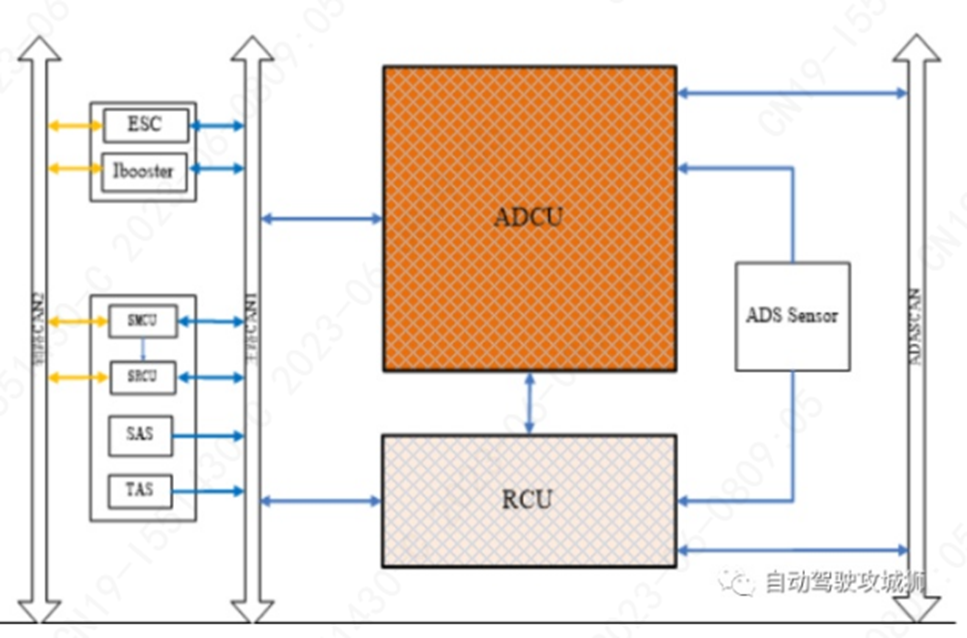
主控制器ADCU+备份控制器RCU,架构如下,双ECU相互监控,当主控制器发生故障,RCU进行接管控制。
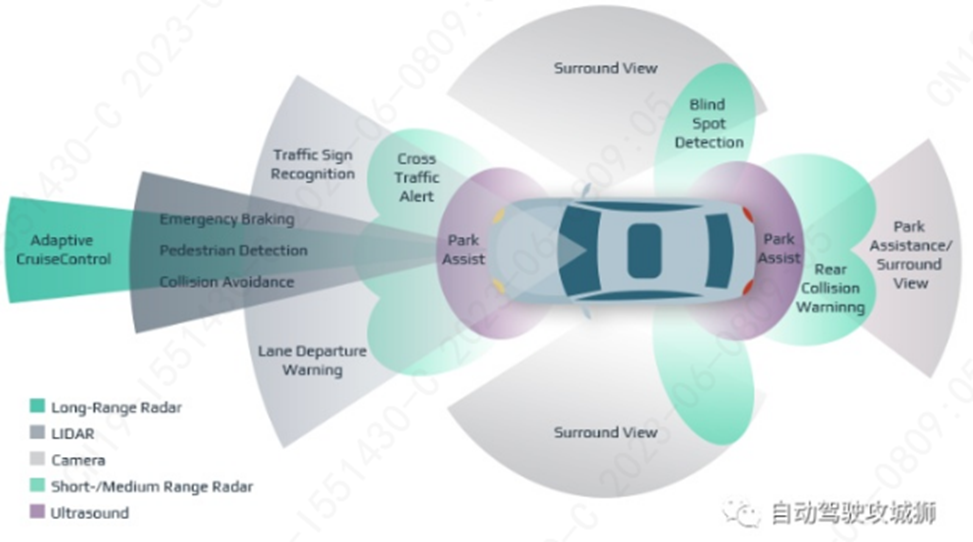
-感知定位冗余(环境监控)
ADS Sensor的冗余,通常是采用多种传感器的备份来实现,Radar/Camera双重覆盖,鲁棒性大大提升,定位层面也可以采用GNSS定位+感知环境重构的定位冗余。
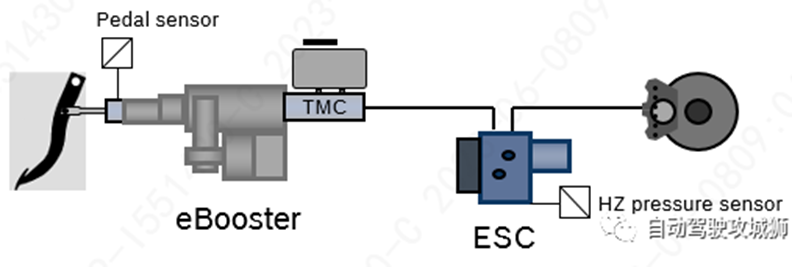
-执行器冗余(制动、转向)
制动冗余,最经典的莫过于ESP+Ibooster方案了,如上面架构图所示,二者同时接受执行指令,一方失效另一方可补充制动,基本可以实现全速域的全制动冗余,目前Bosch还推出了最新的IPB+RBU的制动冗余方案。
两套电机,两套电源以及两套绕组的双EPS转向冗余,相当于完全独立的两套EPS硬件,相互独立,相互备份,整体成本较高,目前使用较少,有些OEM尝试采用四轮差速控制来实现转向效果,但实际应用也较少。

通讯冗余、电源冗余
-通讯冗余(控制信息传递)和电源冗余(支撑失效降级)
相对比较容易理解,通过架构设计的多链路通讯和供电设计即可满足。

分享最新的 NVIDIA AI Software 资源以及活动/会议信息,精选收录AI相关技术内容,欢迎大家加入社区并参与讨论。
更多推荐



 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)