
基于MATLAB自动驾驶车辆决策控制
基于MATLAB自动驾驶车辆决策控制简介:在密集的城市环境中为共享自动驾驶车队提供控制和决策架构。该项目实现了自动驾驶汽车的决策架构和控制律,既可以在 MATLAB 上工作,也可以集成到 Carla 模拟器中。以下文字及示例代码仅供参考。
·
基于MATLAB自动驾驶车辆决策控制
简介:
在密集的城市环境中为共享自动驾驶车队提供控制和决策架构。
该项目实现了自动驾驶汽车的决策架构和控制律,既可以在 MATLAB 上工作,也可以集成到 Carla 模拟器中。
以下文字及示例代码仅供参考
文章目录
基于MATLAB的自动驾驶车辆决策与控制
在自动驾驶系统中,决策(Decision Making) 和 控制(Control) 是两个关键模块。它们分别负责:
- 决策层:根据感知信息(如目标检测、路径规划等)做出驾驶行为选择(如换道、超车、避障、跟车等)。
- 控制层:将高层决策转化为底层执行器指令(如方向盘转角、油门/刹车踏板开度),使车辆按预期轨迹行驶。
🧠 一、自动驾驶系统层级结构
自动驾驶系统通常分为以下几个层次:
| 层级 | 功能 |
|---|---|
| 感知(Perception) | 获取环境信息(摄像头、雷达、激光雷达、GPS 等) |
| 定位(Localization) | 确定车辆自身位置(融合 GPS、IMU、SLAM 等) |
| 决策(Decision Making) | 行为选择(路径规划、行为决策、轨迹生成) |
| 控制(Control) | 执行动作(纵向控制 + 横向控制) |
🛣️ 二、决策系统设计(Behavior Planning)
1. 输入:
- 当前车辆状态(速度、位置、方向)
- 高精地图(HD Map)
- 周围交通参与者信息(行人、车辆、障碍物)
- 路径规划输出(全局路径)
2. 输出:
- 行为指令(Lane Keeping, Lane Changing, Stop & Go, Overtake, Avoidance 等)
3. 实现方式:
✅ 基于规则的方法(Rule-based)
- 使用状态机(State Machine)或有限状态自动机(FSM)
- 条件判断(If-Else / Switch-Case)
✅ 基于学习的方法(Learning-based)
- 强化学习(Reinforcement Learning)
- 决策树、随机森林、深度神经网络(DNN)
🎮 示例:基于状态机的行为决策逻辑(MATLAB)
% 定义决策状态
states = {'LANE_KEEPING', 'OVERTAKING', 'CHANGING_LANE_LEFT', ...
'CHANGING_LANE_RIGHT', 'STOPPING', 'EMERGENCY_STOP'};
% 初始化当前状态
currentState = 'LANE_KEEPING';
for t = 1:Timesteps
% 获取传感器数据和周围车辆状态
frontVehicle = getFrontVehicle();
leftAvailable = isLaneFree('left');
rightAvailable = isLaneFree('right');
% 状态转移逻辑
switch currentState
case 'LANE_KEEPING'
if ~isempty(frontVehicle) && frontVehicle.speed < currentSpeed - 5
currentState = 'OVERTAKING';
elseif ~leftAvailable && ~rightAvailable
currentState = 'STOPPING';
end
case 'OVERTAKING'
if inTargetLane()
currentState = 'LANE_KEEPING';
end
case 'STOPPING'
if frontVehicle.empty
currentState = 'LANE_KEEPING';
end
end
% 输出当前决策
decision(t) = currentState;
end
🚗 三、控制系统设计(Control System)
1. 控制任务分解
| 类型 | 目标 | 控制变量 |
|---|---|---|
| 纵向控制(Longitudinal Control) | 控制加速度/速度 | 油门、刹车 |
| 横向控制(Lateral Control) | 控制转向 | 方向盘转角 |
⚙️ 四、纵向控制(Speed Control)
PID 控制器示例(MATLAB)
% 参数设置
Kp = 0.8; Ki = 0.05; Kd = 0.01;
targetSpeed = 60; % km/h
currentSpeed = 0;
integral = 0;
prevError = 0;
for t = 1:N
error = targetSpeed - currentSpeed;
integral = integral + error * dt;
derivative = (error - prevError) / dt;
throttle = Kp*error + Ki*integral + Kd*derivative;
% 应用控制信号并更新速度
currentSpeed = updateVehicleSpeed(throttle);
prevError = error;
end
🔄 五、横向控制(Steering Control)
1. Stanley Controller(常用于轨迹跟踪)
适用于已知参考路径的情况(如车道线或路径规划结果)。
function delta = stanleyControl(x, y, theta, ref_path, k)
% x, y: 当前坐标
% theta: 当前航向角
% ref_path: 参考路径点集合
% k: 控制增益
% 寻找最近路径点
[~, idx] = min((ref_path(:,1)-x).^2 + (ref_path(:,2)-y).^2);
xe = ref_path(idx, 1); ye = ref_path(idx, 2);
% 计算横向误差
e = (y - ye)*cos(theta) - (x - xe)*sin(theta);
% 计算航向误差
theta_ref = atan2(ref_path(end,2)-ye, ref_path(end,1)-xe);
psi = theta_ref - theta;
% 控制律
delta = psi + atan(k * e / max(velocity, 0.1));
end
🧰 六、Simulink 模型搭建建议
你可以使用 Simulink 构建一个完整的闭环仿真系统:
1. 模块划分建议:
- Environment Model(场景模型)
- Path Planner(路径规划器)
- Behavior Decision Module(行为决策模块)
- Trajectory Generator(轨迹生成器)
- Controller Block(PID / MPC / Stanley 控制器)
- Vehicle Dynamics Block(车辆动力学模型)
2. 工具箱推荐:
- Automated Driving Toolbox
- Model Predictive Control Toolbox
- Simulink Real-Time
- Vehicle Dynamics Blockset
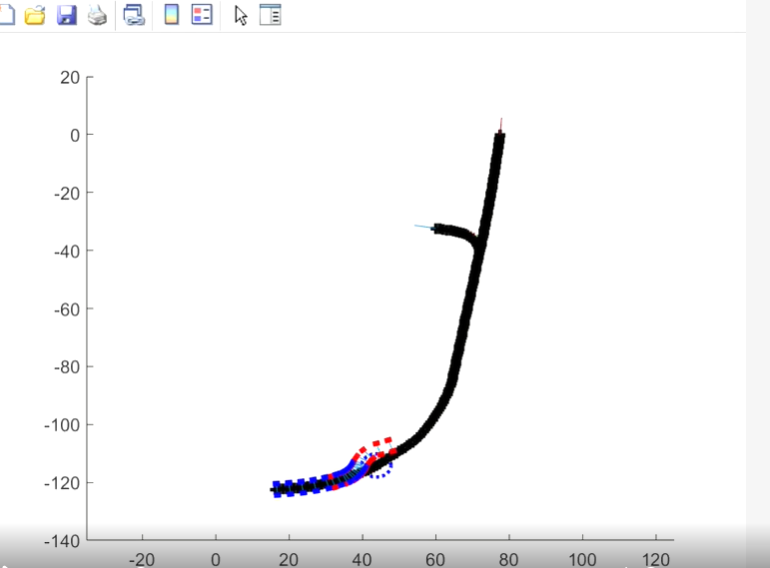
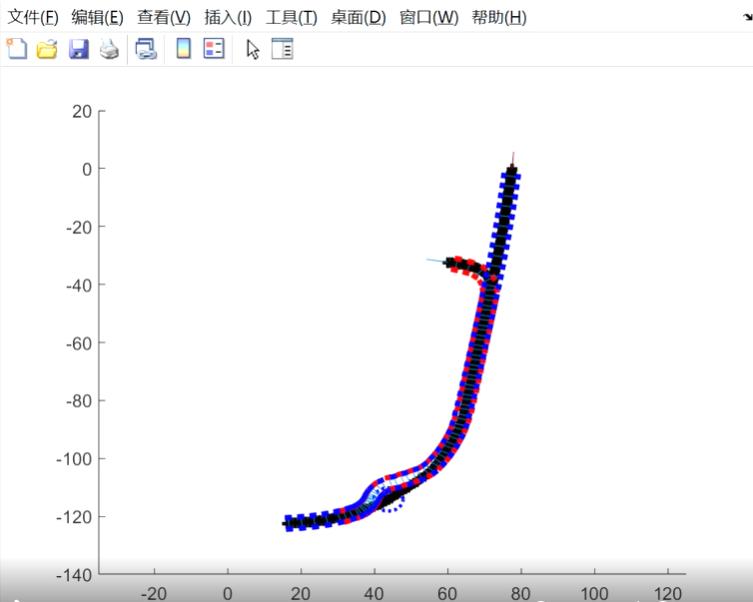
📊 七、可视化与评估
可视化工具:
- MATLAB Plot / Animation
- Simulink 3D Animation
- Driving Scenario Designer(自动生成测试场景)
性能评估指标:
- 跟踪误差(横纵向偏差)
- 控制稳定性(抖动、超调)
- 决策合理性(是否频繁变道、是否安全)
- 实时性(响应时间、CPU占用率)
🔁 八、进阶内容
1. 模型预测控制(MPC)
- 更适合处理多输入多输出、有约束的问题
- 支持同时优化纵向和横向控制
2. 自适应控制
- 根据道路附着系数动态调整控制器参数
3. 多传感器融合
- 使用 EKF/UKF 融合 IMU、GPS、视觉等信息
4. ROS 与 MATLAB 联合开发
- 使用 ROS Toolbox 进行实时通信与联合仿真

分享最新的 NVIDIA AI Software 资源以及活动/会议信息,精选收录AI相关技术内容,欢迎大家加入社区并参与讨论。
更多推荐



 20
20 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)