
自动驾驶---轨迹优化的两种思路
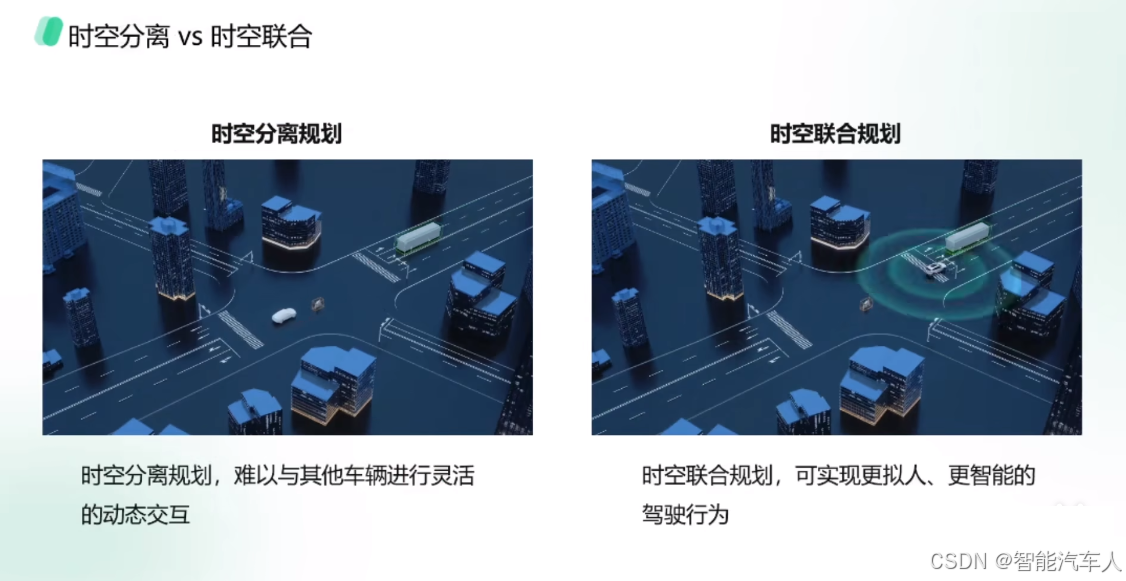
自动驾驶轨迹规划方法主要分为横纵分离与横纵联合两种。横纵分离规划将运动分解为横向和纵向独立优化,计算效率高但忽略耦合效应;横纵联合规划则通过非线性模型预测控制处理耦合问题,能获得更优轨迹但计算复杂度高。两种方法各有优劣,发展趋势呈现混合架构方向,结合分离方法的实时性和联合优化的全局最优性,并引入数据驱动技术提升复杂场景的适应性。
1 前言
早期的不少规划算法都是横纵分离的(比如Apollo,目前依然有不少公司沿用Apollo的架构),先求解path之后,依赖path的结果再进行speed的求解。这种横纵解耦规划方式的特点也比较明显:
- 相对较为简单,计算量通常较小,容易实现实时性要求。
- 由于分别规划横向和纵向运动,可能会忽略两者之间的耦合关系,导致规划结果不够准确。
- 在复杂场景下,可能无法很好地适应车辆等其它动态障碍物的变化。
随着技术的发展和性能的要求,横纵分离算法的弊端越来越明显,因此时空联合规划的idea逐渐浮出。那么本篇博客主要介绍轨迹优化相关的一些知识,包括横纵分离以及横纵联合(或者叫时空联合规划)。
2 轨迹优化
在自动驾驶轨迹生成中,横纵分离求解与横纵联合求解是两种核心方法论,其差异体现在对车辆运动的分解方式和优化目标的整合程度上。
2.1 横纵分离
核心思想:将车辆运动分解为横向(Lateral)和纵向(Longitudinal)两个独立子问题,分别进行规划与控制。
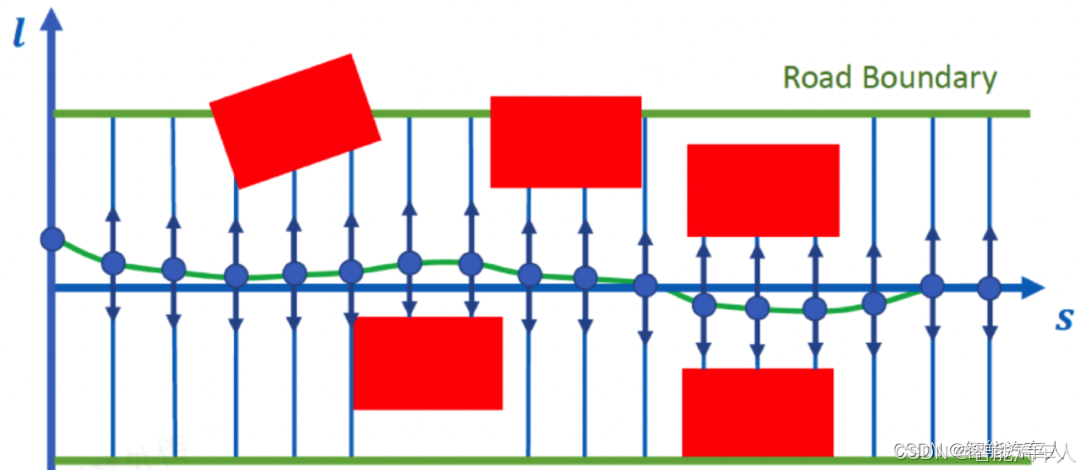
2.1.1 横向规划的 QP 求解
(1)问题建模
-
目标函数: 最小化路径跟踪误差(横向偏差)和曲率平滑度:
-
其中,
为横向偏差,
为曲率,
为曲率变化率,
为权重系数。
-
状态变量: 离散化时间点
对应的位置
,
,航向角
。
-
控制变量: 方向盘转角
或曲率
。
(2)约束条件
-
运动学约束: 曲率与方向盘转角关系:
其中 L 为轴距。
-
物理极限约束: 最大方向盘转角
,曲率上下限
。
-
障碍物约束: 基于几何投影的安全距离约束:
-
......
(3)QP 形式化
将目标函数和约束转换为标准 QP 形式:(详细内容及公式推导可参考博客《自动驾驶---Motion Planning之轨迹Path优化》)

2.1.2 纵向规划的 QP 求解
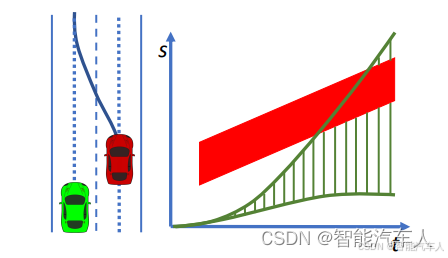
(1)问题建模
-
目标函数: 最小化速度跟踪误差和加速度变化率(仅举例舒适性):
其中,
为参考速度,a 为加速度,
为加速度变化率。
-
状态变量: 速度
、加速度
。
-
控制变量: 油门 / 刹车指令
(通过车辆动力学模型映射为加速度)。
(2)约束条件
-
动力学约束: 加速度与油门 / 刹车关系:
-
物理极限约束: 最大加速度
、最小减速度
,最大油门 / 刹车行程
。
-
安全约束: 与前车的安全距离:
与前车的安全距离:
其中为最大减速度,
为静态安全距离。
-
......
(3)QP 形式化
将纵向问题转化为标准 QP,优化变量为加速度序列,约束包括动力学模型、安全距离和物理极限。
详细内容及公式推导见博客《自动驾驶---Motion Planning之轨迹Speed优化》。
2.1.3 优势与局限性
- 优势:
- 计算效率高:二维问题降维为两个一维问题,适合实时性要求高的场景(如城市道路)。
- 模块化设计:横向与纵向模块可独立开发、测试和迭代。
- 局限性:
- 忽略耦合效应:例如高速过弯时,纵向加速度会影响横向稳定性(离心力变化)。
- 次优解风险:分离优化可能导致全局非最优(如紧急制动时的转向响应延迟)。
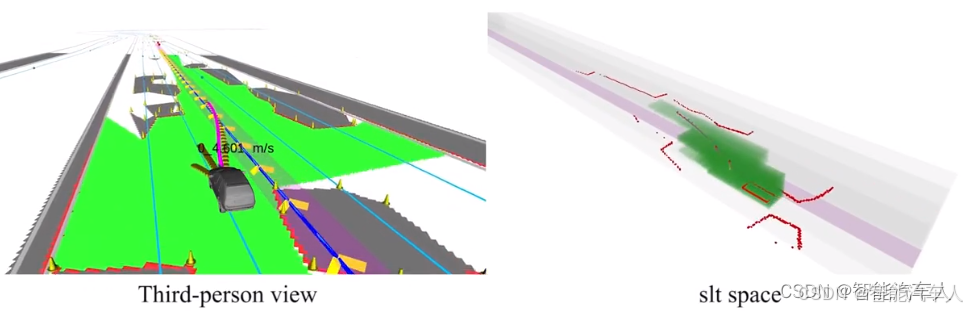
2.2 横纵联合
核心思想:将横向与纵向运动作为统一的动态系统进行联合优化,充分考虑运动耦合。其中涉及的主要内容可参考以下博客:
《自动驾驶---Motion Planning之构建SLT Driving Corridor》
《自动驾驶---Motion Planning之STSC轨迹优化》
2.2.1 联合优化框架
- 数学模型:
- 车辆动力学模型:使用单车模型(Bicycle Model)或更复杂的多体动力学模型。
- 状态变量:包含位置 (x, y)、航向角 θ、速度 v、横摆角速度 ω 等。
- 控制变量:方向盘转角 δ 和加速度 a。
- 优化目标:
- 最小化路径跟踪误差(横向偏差、航向偏差)。
- 最小化加速度 / 减速度变化率(Jerk)以提升舒适性。
- 满足障碍物避让约束。
- ......
- 方法:
- CILQR
- PiecewiseCurve(QP)---Bezier/Polynomial
2.2.2 难点
- 高维状态空间:联合求解需处理更多状态变量(如横摆角速度、侧向加速度)。
- 实时性问题:优化计算量随预测时域增长呈指数级上升。
- 约束处理:同时满足运动学(如最大转向角)和动力学(如轮胎附着力极限)约束。
2.2.3 优势及应用场景
- 优势:
- 全局最优性:通过联合优化生成更安全、舒适的轨迹。
- 复杂场景适应性:适用于急弯、高速变道等耦合效应显著的场景。
- 典型应用:
- 城区自动驾驶(如绕行等)。
- 极端工况(如紧急避障、麋鹿测试,这种场景只能靠类似AEB的功能)。
2.3 对比
维度对比结果如下表所示:
| 维度 | 横纵分离求解 | 横纵联合求解 |
|---|---|---|
| 计算复杂度 | 低(线性或二次规划) | 高(非线性优化) |
| 实时性 | 适合低延迟场景(如城市低速) | 依赖硬件加速(如高速场景) |
| 轨迹质量 | 满足基本需求,但可能非最优 | 更优的舒适性与安全性 |
| 工程实现难度 | 低(模块化设计) | 高(需精确动力学建模) |
3 总结
总的来说,横纵分离求解以高效性和工程实用性为核心,适合大多数常规场景;横纵联合求解以优化性能为目标,适用于对轨迹精度要求极高的复杂工况。
在当前阶段,仍然很多企业在横纵分离阶段继续奋进,也有一些头部企业逐步切入到时空联合优化,头部智驾企业结合大模型和时空联合优化走在了前列。
未来的方向在哪里?“那就参考特斯拉吧。”

分享最新的 NVIDIA AI Software 资源以及活动/会议信息,精选收录AI相关技术内容,欢迎大家加入社区并参与讨论。
更多推荐



 35
35 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)