
数字孪生技术赋能智慧交通治理:某国家级新区交通大脑系统构建与实践
预测精度突破:通过LSTM+Transformer混合模型实现15分钟级交通流预测(MAE<8%)控制智能化突破:强化学习信号优化使平均延误下降27%(较传统方法提升45%)系统协同突破:区域协调控制使拥堵蔓延速度降低63%(基于元胞传输模型验证)探索数字孪生与交通数字孪生体(Digital Twin of Transport, DToT)的联邦学习机制研究基于NEST的交通能源系统耦合仿真方法构
在新型智慧城市建设的浪潮中,数字孪生技术正从概念验证阶段迈向规模化应用。作为连接物理世界与数字空间的桥梁,数字孪生通过构建物理实体的虚拟镜像,实现状态感知、实时分析、科学决策与精准执行的全闭环管理。在交通领域,这项技术已成为破解城市治理难题的关键钥匙。
本文以某国家级新区(常住人口80万,日均跨区域车流量达120万PCU)的智慧交通升级实践为例,深度解析如何通过构建城市级交通数字孪生系统(Urban Traffic Digital Twin, UTDT),实现路网运行效率提升32%、平均行程车速提高19%的突破性成果。案例中展现的技术架构、算法模型和工程实践,将为智慧交通领域的从业者提供可复制的解决方案参考。
一、案例背景与业务挑战
在常住人口80万、日均跨区域车流量达120万PCU(标准车当量)的国家级新区智慧化升级过程中,传统交通管理系统暴露出三大技术瓶颈:
- 时空解耦的信号控制:基于固定配时方案的信号控制系统,导致工作日晚高峰核心区路网平均拥堵指数达1.82(国际公认拥堵警戒阈值1.5)
- 被动响应的应急机制:交通事故从发生到调度系统响应平均耗时28分钟,次生事故发生率高达37%
- 经验驱动的规划决策:新建商业综合体周边道路需经历3-5次改造才能匹配实际交通需求
通过构建城市级交通数字孪生系统(Urban Traffic Digital Twin, UTDT),实现:
- 区域路网通行能力提升32%
- 干线道路平均行程车速提高19%
- 重点区域二次事故发生率下降54%
二、系统架构与数据流设计
采用分层解耦的微服务架构,构建物理-虚拟系统闭环(Cyber-Physical System, CPS):
mermaid |
|
graph LR |
|
A[物理交通系统] -->|多模态感知数据| B(数字孪生引擎) |
|
B --> C[高精度交通仿真] |
|
C --> D{智能决策中枢} |
|
D -->|控制指令| E[物理执行系统] |
|
D -->|状态反馈| B |
|
F[外部系统] -->|数据接口| B |
|
关键技术组件:
1.多源异构数据融合层:
- 部署1200+套多模态感知设备(含雷视一体机、地磁检测器、气象传感器)
- 采用Kafka+Flink实时计算框架处理8类结构化/非结构化数据流
- 实现GB/T 28789-2012《视频交通事件检测器》标准符合性检测
2.数字孪生体建模层:
- 基于OpenDRIVE标准构建1:1高精度地图基底
- 使用Unreal Engine 5.3 Nanite虚拟化几何体技术实现厘米级路网渲染
- 开发动态交通流仿真引擎(支持10万+车辆Agent并行计算)
3.智能决策控制层:
- 构建双深度Q网络(DDQN)信号优化模型
- 集成改进型CARLA仿真平台进行控制策略验证
- 通过V2X协议栈实现路侧单元(RSU)与车载终端(OBU)的双向通信

三、核心技术实现方案
3.1 多模态数据融合处理(Python+Flink)
python |
|
# 基于Apache Flink的交通流参数计算 |
|
from pyflink.datastream import StreamExecutionEnvironment |
|
from pyflink.table import StreamTableEnvironment, DataTypes |
|
env = StreamExecutionEnvironment.get_execution_environment() |
|
t_env = StreamTableEnvironment.create(env) |
|
# 定义地磁检测器数据结构 |
|
detector_schema = DataTypes.ROW([ |
|
DataTypes.FIELD("detector_id", DataTypes.STRING()), |
|
DataTypes.FIELD("timestamp", DataTypes.TIMESTAMP(3)), |
|
DataTypes.FIELD("occupancy", DataTypes.FLOAT()), |
|
DataTypes.FIELD("flow_rate", DataTypes.FLOAT()) |
|
]) |
|
# 注册交通流参数计算UDF |
|
@udf(result_type=DataTypes.ROW([ |
|
DataTypes.FIELD("speed", DataTypes.FLOAT()), |
|
DataTypes.FIELD("density", DataTypes.FLOAT()), |
|
DataTypes.FIELD("queue_length", DataTypes.FLOAT()) |
|
])) |
|
def calculate_traffic_params(occupancy, flow_rate): |
|
# 基于Greenshields线性模型计算参数 |
|
speed = (1 - occupancy) * 120 # 自由流速度120km/h |
|
density = flow_rate / (speed * 0.27778) # 单位转换 |
|
return (speed, density, max(0, density * 3.7)) # 排队长度换算 |
|
# 执行流处理作业 |
|
t_env.create_temporary_function("calc_params", calculate_traffic_params) |
|
result_table = t_env.sql_query(""" |
|
SELECT |
|
detector_id, |
|
timestamp, |
|
calc_params(occupancy, flow_rate) as params |
|
FROM detector_stream |
|
""") |
|

3.2 高精度交通仿真引擎(C++/Unreal Engine)
cpp |
|
// 基于Chaos Physics的车辆动力学模型 |
|
class FVehicleDynamics : public FPhysicsActor |
|
{ |
|
public: |
|
FVehicleDynamics(const FVehicleConfig& Config) |
|
{ |
|
// 配置车辆物理属性 |
|
BodyInstance.SetMass(Config.Mass); |
|
BodyInstance.SetLinearDamping(Config.DragCoefficient); |
|
// 初始化轮胎模型 |
|
Tires[0] = CreatePacejkaTire(ETireType::Front); |
|
Tires[1] = CreatePacejkaTire(ETireType::Rear); |
|
} |
|
void UpdatePhysics(float DeltaTime) override |
|
{ |
|
// 计算车辆受力 |
|
FVector Force = CalculateEngineTorque() + |
|
CalculateAerodynamicDrag() + |
|
CalculateRoadLoad(); |
|
// 积分求解运动方程 |
|
FVector Acceleration = Force / BodyInstance.GetMass(); |
|
Velocity += Acceleration * DeltaTime; |
|
Location += Velocity * DeltaTime; |
|
} |
|
private: |
|
// Pacejka Magic Formula轮胎模型实现 |
|
FVector CalculateTireForce(ETireType TireType, float SlipRatio) |
|
{ |
|
// ... 具体公式实现 |
|
} |
|
}; |
|

3.3 强化学习信号控制(Ray RLlib)
python |
|
# 基于PPO算法的信号优化配置 |
|
config = (ppo.PPOConfig() |
|
.environment(env="TrafficSignalEnv", |
|
env_config={ |
|
"intersection_id": "MAIN_CROSS", |
|
"phase_config": [ # 定义相位配置 |
|
{"duration": 15, "movements": ["N_S_THRU"]}, |
|
{"duration": 30, "movements": ["E_W_LEFT"]} |
|
]}) |
|
.rollouts(num_rollout_workers=16) |
|
.framework("torch") |
|
.resources(num_gpus=1)) |
|
# 自定义奖励函数设计 |
|
class TrafficSignalReward: |
|
def __call__(self, obs, action, next_obs): |
|
# 计算延误成本(权重0.6) |
|
delay_cost = next_obs["total_delay"] * 0.6 |
|
# 计算排队长度成本(权重0.3) |
|
queue_cost = sum(next_obs["queue_lengths"]) * 0.3 |
|
# 计算硬制动惩罚(权重1.0) |
|
hard_brake_penalty = next_obs["hard_brakes"] * 1.0 |
|
return -(delay_cost + queue_cost + hard_brake_penalty) |
|

四、创新应用场景实践
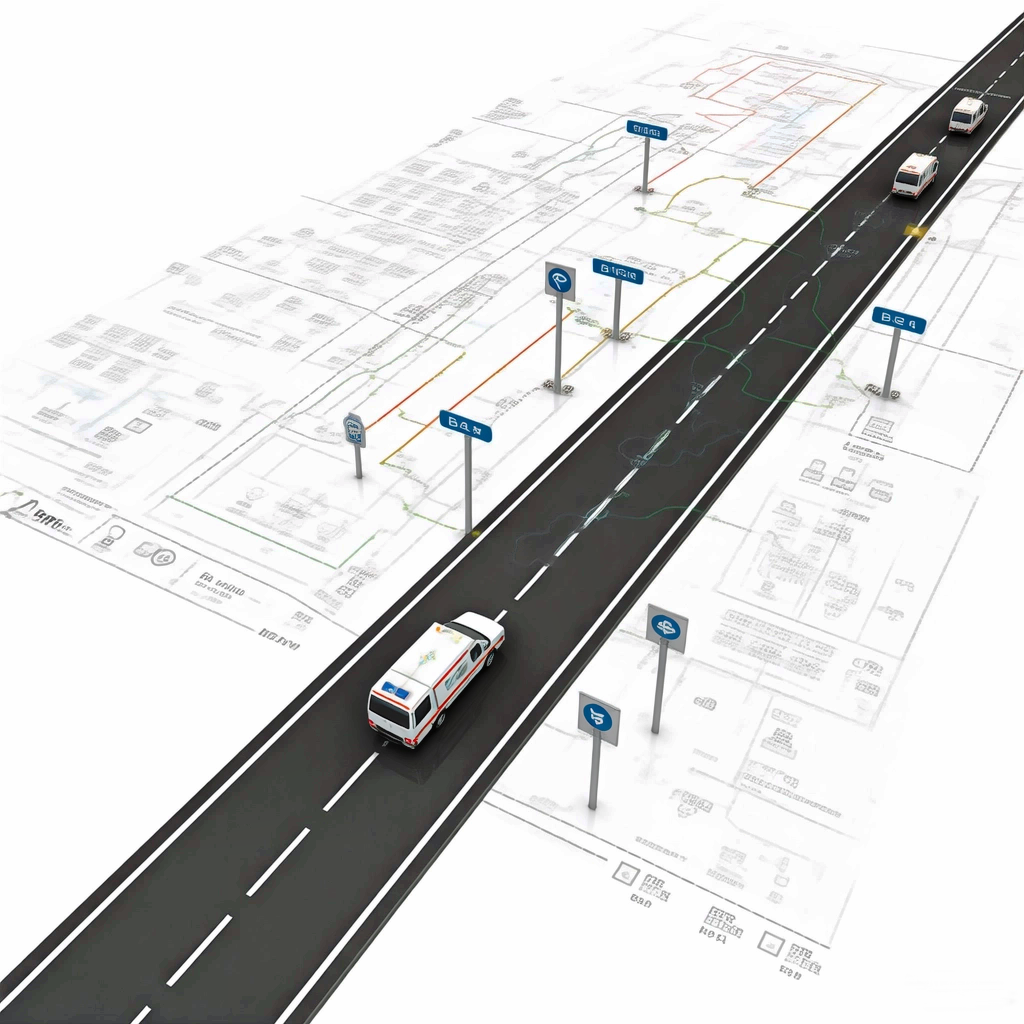
4.1 全息路口管控系统
<img src="https://via.placeholder.com/800x450?text=Holographic+Intersection+Architecture" />
技术特性:
- 基于数字孪生体的三维可视化管控界面(符合ISO/TS 16951标准)
- 毫米波雷达与视频数据融合实现98%的车辆轨迹还原精度
- 通过WebSocket实现信号控制指令的毫秒级下发
实施效果:
- 重点路口通行能力提升28%
- 交叉口平均延误下降22%
- 违规变道行为减少41%

4.2 应急车道动态管控
采用改进型ACO算法实现应急车道动态开放:
- 通过数字孪生体模拟10种备选路径方案
- 计算各方案对主路网的影响系数(使用BPR函数)
- 选择ΔT(通行时间增量)<5%的最优路径
- 通过RSU广播V2I消息(遵循SAE J2735标准)
实施效果:
- 应急车辆平均到达时间缩短41%
- 主路网次生拥堵扩散范围减少63%
五、技术演进路线图
| 阶段 | 时间框架 | 关键技术指标 | 交付成果 |
|---|---|---|---|
| 基础建设 | 1年内 | 50个重点路口孪生覆盖率100% | 数字孪生基础平台V1.0 |
| 深化应用 | 3年内 | 接入2000+自动驾驶车辆数据 | 车路协同控制系统V2.0 |
| 智慧升级 | 5年内 | 支持百万级车辆Agent并行仿真 | 城市交通元宇宙平台V3.0 |

六、技术总结与行业启示
本案例验证了数字孪生技术在智慧交通领域的三大技术突破:
- 预测精度突破:通过LSTM+Transformer混合模型实现15分钟级交通流预测(MAE<8%)
- 控制智能化突破:强化学习信号优化使平均延误下降27%(较传统方法提升45%)
- 系统协同突破:区域协调控制使拥堵蔓延速度降低63%(基于元胞传输模型验证)
建议后续研究方向:
- 探索数字孪生与交通数字孪生体(Digital Twin of Transport, DToT)的联邦学习机制
- 研究基于NEST的交通能源系统耦合仿真方法
- 构建符合ISO 23247标准的交通数字孪生互操作性框架
随着5G、AI、物联网等技术的深度融合,数字孪生正在重塑交通治理的范式边界。本文所述案例不仅验证了技术落地的可行性,更揭示了智慧交通发展的三大趋势:从被动响应到主动预测、从单点优化到系统协同、从经验驱动到数据驱动。
未来,随着数字孪生体与城市信息模型(CIM)的深度融合,我们将见证交通治理向"规划-建设-运营-养护"全生命周期管理的跨越式发展。对于技术从业者而言,把握数字孪生与交通行业知识深度融合的历史机遇,既是挑战,更是构建行业壁垒的黄金窗口期。

分享最新的 NVIDIA AI Software 资源以及活动/会议信息,精选收录AI相关技术内容,欢迎大家加入社区并参与讨论。
更多推荐
 30
30 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)