
【自动驾驶】基于几何模型的跟踪方法——Stanley算法
本文介绍了自动驾驶中基于几何模型的路径跟踪算法:Stanley算法
目录
一、Stanley算法原理
1.算法简介
Stanley算法是一种经典的路径跟踪算法,由斯坦福大学团队在2005年DARPA自动驾驶挑战赛中首次应用于无人车“Stanley”,并成功夺冠。该算法基于几何模型,通过横向误差和航向误差调整车辆转向角,实现高效稳定的路径跟踪。
2.核心思想
算法的核心是将参考点设置在前轮中心,其控制律结合了横向误差(Cross-Track Error)和航向误差(Heading Error),并引入车速反馈以提升稳定性,实现横向跟踪误差收敛到0。
3.算法原理及推导
综合三个控制要求,实现路径跟踪的转向控制:
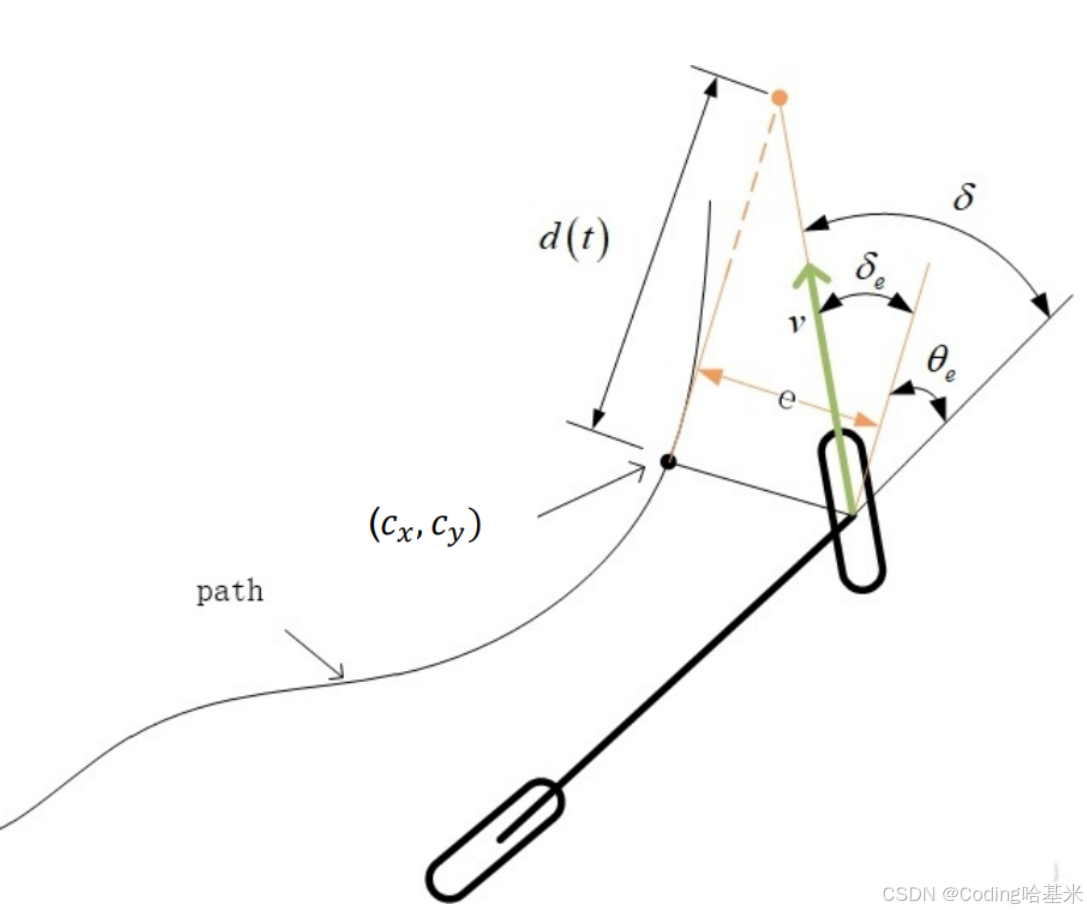
(1)航向对齐控制
目标:为了消除相对路径的航向误差,使车辆当前航向角与期望航向角一致。
:当前航向角与期望航向角的误差。
假设车辆没有横向误差, 即 时,前轮只需转过
的角度就可以完全追踪上参考轨迹,直接通过航向误差生成转向角,无比例增益(假设误差单位为弧度)。
(2)横向误差控制
目标:消除车辆与路径的横向偏差。
假设前轮中心为 ,取前轮中心最近的点为
,沿速度方向的交点得到
。这样可以看出由横向误差所产生的
,可得:
其中,是与速度有关的量,加入与速度相反的比例系数
,则:
前轮转角误差就可写成:
:横向误差(车辆到路径的垂直距离)。
:车辆当前速度。
:实验确定的增益系数。
特点:
- 比例调节:横向误差越大,转向角越大。
- 速度反比:高速时转向更平缓,避免失控。
- 限幅效果:
函数限制大误差时的转向幅度(趋近于±90°)。
(3)转向角机械限制
-
约束条件:
- 实际车辆转向系统存在物理限制(如±30°)。
(4)总转向角计算
综合航向误差与横向误差的转向角,并施加机械限制:
二、误差对转向角的影响
1.大航向误差
当导航角误差非常大,且转向指令与导航角方向相反时:
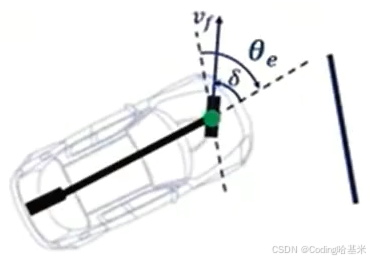
可以看到车头朝向和参考轨迹的角度差为 ,这时前轮转角已经非常大,要让车辆转角纠正与路径的错位,就会有很大的航向误差。此时我们会让车辆保持
来修正误差
2.大横向误差
假设初始时航向误差为 0 ,由于横向误差很大,导致转向角很大:

此时车辆不断地向参考轨迹靠近,即车辆会不断地转向参考路径,而这样会增加相反方向的航向误差.
当转向角开始以最大的方向往参考轨迹转时,车就会变成下图这样,航向误差在增加,直至当航向误差超过 时,前轮转角会到达平衡状态,即航向误差和横向误差相互抵消。
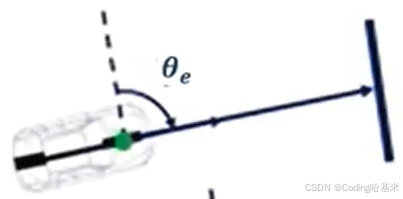
此时前轮转角保持直行到参考路径,直到横向误差减小,这时才开始再次矫正与路径对齐,让车辆开始更紧密的追踪路径。

三、算法误差分析
车辆速度的分量可以分解为:
- 沿参考路径方向的分量:
- 垂直于参考路径方向的分量:
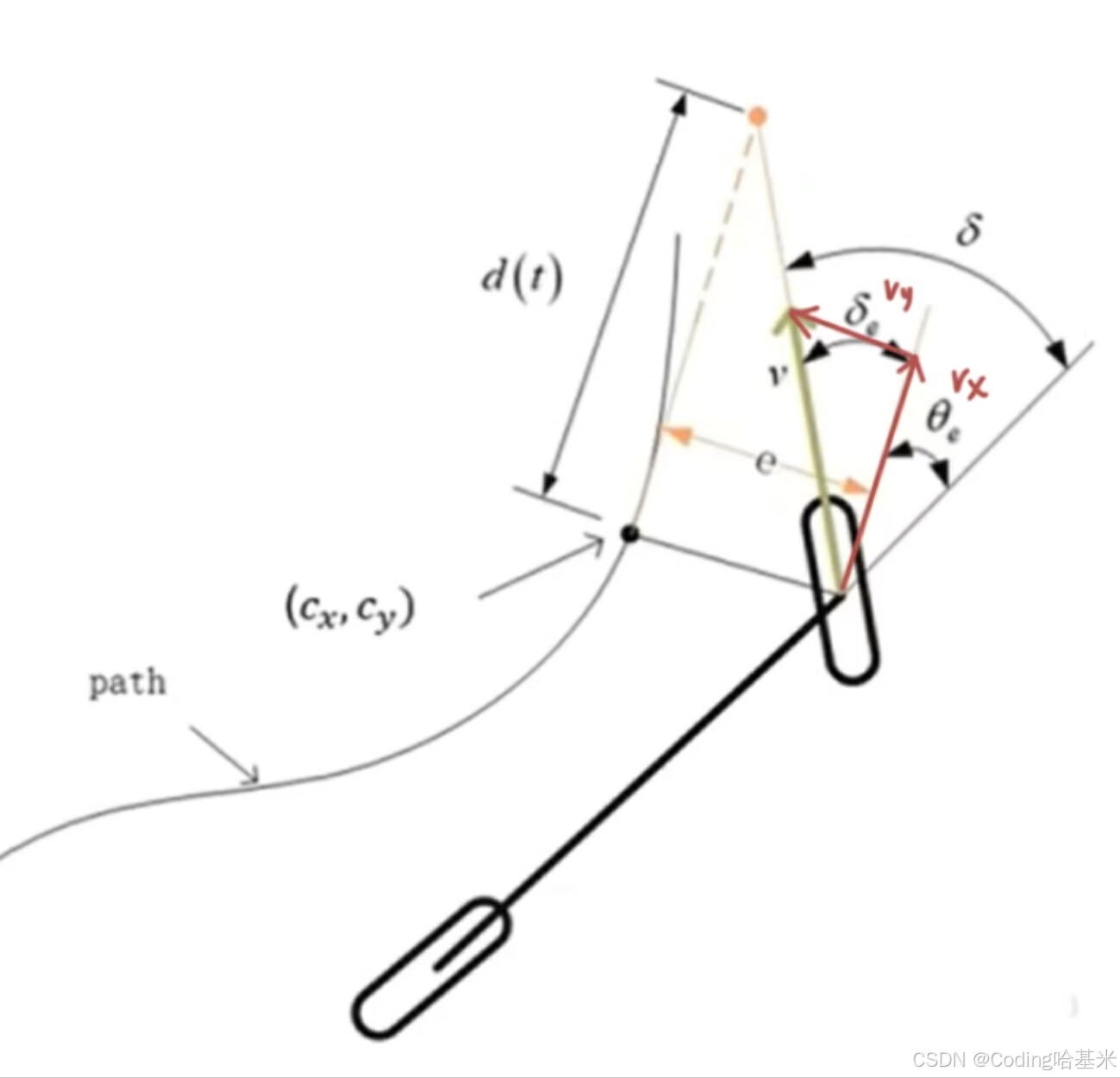
因为 是横向误差,受车辆垂直于路径方向速度的影响,因此横向误差的变化率
)等于车辆在垂直方向上的速度分量:
从图中可以看出,当车辆的横向误差增大时,车辆是朝着负方向偏离路径的(与定义的路径方向相反)。因此需要加一个负号来表明误差的变化方向:
在跟踪过程中。车辆转角一般很小,可以近似为:
带入得:
假设横向误差相对较小,则分母部分可近似为 1 ,可以得到微分方程:
跟踪误差的解为自然指数衰减形式,自然指数衰减的方程就是稳定的,同时根据微分方程,还可以看出当 值增加时,衰减更快,就可以加快误差纠正。
四、Stanley 算法优化
在实际运用中,Stanley 算法仅仅是基于几何模型的轨迹追踪控制器,因此并没有考虑到实际车辆很多不同的方面,比如噪声的测试、执行器的动力学,轮胎力效应等等,而所有的这些因素都可能在跟踪轨迹过程中导致不良的特性,但可以在对 Stanley 算法做一些调整,来避免不良的问题。
1. 低速情况下的噪声软化
在低速情况下,Stanley 算法面对很大噪声时,对速度的估计会表现得非常激进,由于此处速度这一项在反正切的分母下面:
在低速估计中,如果有一点误差 ,会导致整个转向命令被放大,从而导致转向角度出现剧烈摆动。这一点对车辆驾驶的舒适度影响非常大,举一个非常极端的例子,假如在高速行驶(速度约为 20 m / s ) 时,若速度估计中存在噪声
,当然这是非常夸大的噪声。在正常高速行驶下,此噪声只占 10%,其实没什么关系。
但如果把噪声放到泊车场景中,可能实际场景的行驶速度只有,这时加了这么大的噪声,可能就占 50% 以上,对转向角造成很大影响。
当然这是非常极端的例子,在现实生活中很难出现这么大的噪声,但我们就是要夸大的讲问题。为了摆脱噪声问题来提高低速的行驶稳定性,常常会加入软化常数:
这样就能够确保分母始终具有最小值, 可根据实际实验场景调整,这样就保证了在低速行驶的稳定性。
2 .高速情况下的航向阻尼
在高速情况下,当有转向命令时,需要转向角更缓慢的变化,以确保侧向力不会过大。而即使在 Stanley 算法里已经有速度的考量,引入了速度量 但 Stanley 算法在高速时反应还是有些过于激进。因此常常会在车头朝向,即
在航向角误差上可以加入阻尼项,实质上就是在航向角误差的控制部分加了 控制器,这样就可以确保在高速时,转向指令可以更缓慢、更准确得确保侧向力不会过大。
3. 引入前馈项
因为 Stanley 算法和 Pure Pursuit 算法都是根据几何模型推导的控制器,并没有考虑参考路径的曲率。所以可通过在航向上引入前馈项来改善曲线跟踪性能,一般前馈项只需要和路径曲率保持一致即可,即只需增加和路径曲率相同的转向角。
4. 综合优化
在实际应用中,横向控制可以转化为 控制器,加入软化常数
再加上前馈控制项
前馈控制项要和实际路径曲率
直接关联,通过这些优化措施就可以使 Stanley 控制器成为更舒适、更准确的轨迹跟踪控制器。
五、与Pure Pursuit算法比较
| Pure Pursuit | Stanley | |
| 误差度量 | 预瞄点与车辆当前位置的几何关系 | 航向误差 + 横向位置误差 |
| 预瞄机制 | 显式使用预瞄点,依赖路径全局信息 | 隐式使用最近点,依赖局部路径信息 |
| 优点 | 高速稳定性好(预瞄距离动态调整) 路径曲率适应性强(圆弧拟合) |
低速精度高(直接纠偏) 对横向误差响应快 |
| 缺点 | 预瞄距离敏感,需精细调参 低速时可能跟踪延迟 |
高速时易震荡(需速度补偿) 复杂曲率路径可能超调 |
|
适用场景 |
高速场景:如公路驾驶,预瞄机制可平滑转向动作 大曲率路径:圆弧拟合能更好地适应连续弯道 |
低速场景:如停车场导航,快速纠正横向偏差 精确跟踪:需要高精度路径跟踪的场景(如狭窄通道) |
六、代码实现
笔者使用的软件为LGSVL Simulator ,其是 LG 的硅谷实验室基于 Unity 引擎研发的一款开源自动驾驶模拟器。 可在ubuntu系统上与ROS进行联合仿真。
下面放一些控制的核心代码:
stanley_controller.cpp
/*
* @Author: HaiChen
* @LastEditTime: 2025-02-07 13:02:07
* @Description: stanel算法核心模块
*/
#include "stanely_control/stanely_controller.h"
#include "stanely_control/pid_controller.h"
#include <algorithm>
#include <iomanip>
#include <utility>
#include <vector>
#include "Eigen/LU"
#include <math.h>
using namespace std;
namespace shenlan {
namespace control {
shenlan::control::PIDController e_theta_pid_controller(1.0, 0.0, 0.4); // PID控制器中的微分环节相当于阻尼,加在航向误差引起的前轮转角上
double atan2_to_PI(const double atan2)
{
return atan2 * M_PI / 180;
}
double PointDistanceSquare(const TrajectoryPoint &point, const double x, const double y)
{
const double dx = point.x - x;
const double dy = point.y - y;
return dx * dx + dy * dy;
}
void Limit(double &value, const double min, const double max)
{
if(value < min)
{
value = min;
}
else if(value > max)
{
value = max;
}
}
//周期性:角度具有周期性,θ 和 θ + 2π 实际上表示相同的方向。因此,将角度限制在 -π 到 π 之间可以使角度值标准化,便于后续的计算和处理。
void NormalizeAngle(double &angle)
{
while(angle > M_PI)
{
angle -= 2 * M_PI;
}
while(angle < -M_PI)
{
angle += 2 * M_PI;
}
}
void StanleyController::LoadControlConf()
{
k_y_ = 0.5;
}
// 计算需要的控制命令, 实现对应的stanley模型,并将获得的控制命令传递给汽车
// 在LGSVL车辆控制消息中,前轮转角的命令是弧度单位
// float32 acceleration_pct # 0 to 1
// float32 braking_pct # 0 to 1
// float32 target_wheel_angle # radians,经过实验,给正值的时候右转,给负值的时候左转
// float32 target_wheel_angular_rate # radians / second
// uint8 target_gear
void StanleyController::ComputeControlCmd(const VehicleState &vehicle_state, const TrajectoryData &planning_published_trajectory, ControlCmd &cmd)
{
// 参考路径点
this->trajectory_points_ =planning_published_trajectory.trajectory_points
// 主车的状态信息
double car_x = vehicle_state.x;
double car_y = vehicle_state.y;
double car_theta = vehicle_state.heading;
double car_v = vehicle_state.velocity;
double e_y = 0.0;
double e_theta = 0.0;
double kappa = 0.0;
this->ComputeLateralErrors(car_x,car_y,car_theta,e_y,e_theta,kappa);
// atan2 返回的是弧度单位,在分子上添加一个软化项,在低速条件下改善控制器性能
double steer_e = atan2(this->k_y_ * e_y , this->k_s + car_v);
// 限制Cross track error 引起的前轮转角的取值区间
NormalizeAngle(steer_e);
// PID控制器中的微分环节相当于阻尼,加在航向误差引起的前轮转角上,抑制高速工况下的过大的前轮转角变化率
double steer_theta = e_theta_pid_controller.Control(e_theta,0.01);
// 限制航向误差引起的前轮转角的取值区间
NormalizeAngle(steer_theta);
// 在连续弯道中,引入一个前馈项来提高跟踪性能,前馈项和路径曲率相同就足够
// LGSVL中的车辆右转的时候,参考路径的曲率为负值,方向盘转角为正值,这里要加个负号
double feedforward = -kappa;
//计算前轮转角
double steer_total = steer_e + steer_theta + feedforward;
// 限制前轮转角的取值区间
NormalizeAngle(steer_total);
// 限制前轮转角的取值区间
Limit(steer_total,-atan2_to_PI(20),atan2_to_PI(20));
// 限制前轮最大转角,这里定义前轮最大转角位于 [-20度~20度]
// 给出控制信号
cmd.steer_target = steer_total;
}
// 计算需要的误差,包括横向误差,纵向误差,误差计算函数没有传入主车速度,因此返回的位置误差就是误差,不是根据误差计算得到的前轮转角
void StanleyController::ComputeLateralErrors(const double x, const double y, const double theta, double &e_y, double &e_theta, double &kappa)
{
// 得到距离最近的路径点的信息
TrajectoryPoint nearestpoint = QueryNearestPointByPosition(x, y);
kappa = nearestpoint.kappa;
// 将位置误差转换为前轮转角的时候:需要将路径上距离车辆最近的点从世界坐标系变换到车辆坐标系下,根据路径点在车辆坐标系下的y坐标的正负决定前轮转角的方向
e_y = sqrt((x - nearestpoint.x) * (x - nearestpoint.x) + (y - nearestpoint.y) * (y - nearestpoint.y));
double y_in_car = (nearestpoint.y - y)*cos(theta) - (nearestpoint.x - x)*sin(theta);
if(y_in_car > 0)
{
//说明目标点在车辆左侧,车辆应该左转以跟踪参考路径
e_y = -e_y;
}
else if (y_in_car < 0)
{
e_y = e_y;
}
// 自动驾驶中一般方向盘转角是左负右正
// 路径上距离车辆最近的点的参考航向角,大于车辆的当前航向角的话,车辆应左转以跟踪航向
e_theta = -(theta_ref_ - theta);
}
// 返回参考路径上和车辆当前位置距离最近的点,返回的是点结构体
TrajectoryPoint StanleyController::QueryNearestPointByPosition(const double x, const double y)
{
double d_min = PointDistanceSquare(trajectory_points_.front(), x, y); // 得到当前位置距离参考路径的第一个点的距离
size_t index_min = 0;
for (size_t i = 1; i < trajectory_points_.size(); ++i)
{
double d_temp = PointDistanceSquare(trajectory_points_[i], x, y);
if (d_temp < d_min)
{
d_min = d_temp;
index_min = i;
}
}
// cout << " index_min: " << index_min << endl;
//cout << "tarjectory.heading: " << trajectory_points_[index_min].heading << endl;
theta_ref_ = trajectory_points_[index_min].heading; // 获得距离车辆当前位置最近的路径点的航向角
return trajectory_points_[index_min];
}
} // namespace control
} // namespace shenlanstanley_controller.h
#pragma once
#include <math.h>
#include <fstream>
#include <iomanip>
#include <memory>
#include <string>
#include "Eigen/Core"
#include "common.h"
namespace shenlan
{
namespace control
{
using Matrix = Eigen::MatrixXd;
class StanleyController
{
public:
StanleyController(){};
~StanleyController(){};
void LoadControlConf();
void ComputeControlCmd(const VehicleState &vehicle_state, const TrajectoryData &planning_published_trajectory, ControlCmd &cmd);
void ComputeLateralErrors(const double x, const double y, const double theta, double &e_y, double &e_theta, double &kappa);
TrajectoryPoint QueryNearestPointByPosition(const double x, const double y);
protected:
std::vector<TrajectoryPoint> trajectory_points_;
double k_y_ = 0.0;//速度项的比例系数
double u_min_ = 0.0;
double u_max_ = 100.0;
double k_s = 1.0;//软化常数
double theta_ref_;
double theta_0_;
};
} // namespace control
} // namespace shenlan
lat_lon_coupled_controller.cpp
/*
* @Author: HaiChen
* @LastEditTime: 2025-02-07 13:07:56
* @Description: PID纵向控制和Stanley横向控制节点
*/
#include "stanely_control/lat_lon_coupled_controller.h"
using namespace std;
using std::placeholders::_1;
static const rclcpp::Logger LOGGER = rclcpp::get_logger("lat_lon_coupled_controller");
StanelyAndPIDController::StanelyAndPIDController() : Node("vehicle_control")
{
first_record_ = false;
V_set_ = 5.0; // m/s
wheelbase_ = 2.852;
car_length_ = 2.852;
pid_controller_longitudinal = std::make_unique<shenlan::control::PIDController>(0.5, 0.0, 0.0);
stanely_controller_lateral = std::make_unique<shenlan::control::StanleyController>();
stanely_controller_lateral->LoadControlConf();
vehicle_control_publisher = this->create_publisher<lgsvl_msgs::msg::VehicleControlData>("/vehicle_cmd", 1000);
global_path_publisher_ = this->create_publisher<nav_msgs::msg::Path>("/global_reference_path", 2);
history_path_visualization_publisher = this->create_publisher<nav_msgs::msg::Path>("/history_path", 2);
localization_data_subscriber = this->create_subscription<nav_msgs::msg::Odometry>("/odom", 10, std::bind(&StanelyAndPIDController::OdomCallback, this, _1));
tf_broadcaster_gps_vehicle = std::make_unique<tf2_ros::TransformBroadcaster>(*this);
vehicle_control_iteration_timer = this->create_wall_timer(10ms, std::bind(&StanelyAndPIDController::VehicleControllerIterationCallback, this));
global_path_publish_timer = this->create_wall_timer(500ms, std::bind(&StanelyAndPIDController::GlobalPathPublushCallback, this));
std::ifstream infile;
infile.open("src/stanley_control/data/cube_town_reference_line.txt"); //将文件流对象与文件连接起来
assert(infile.is_open()); //若失败,则输出错误消息,并终止程序运行
std::vector<std::pair<double, double>> xy_points;
std::string s;
std::string x;
std::string y;
while (getline(infile, s))
{
std::stringstream word(s);
word >> x;
word >> y;
double pt_x = std::atof(x.c_str());
double pt_y = std::atof(y.c_str());
xy_points.push_back(std::make_pair(pt_x, pt_y));
}
infile.close();
// 读取参考线文件并构建参考路径
std::vector<double> headings;
std::vector<double> accumulated_s;
std::vector<double> kappas;
std::vector<double> dkappas;
std::unique_ptr<shenlan::control::ReferenceLine> reference_line = std::make_unique<shenlan::control::ReferenceLine>(xy_points);
reference_line->ComputePathProfile(&headings, &accumulated_s, &kappas, &dkappas);
for (size_t i = 0; i < headings.size(); i++)
{
std::cout << "pt " << i << " heading: " << headings[i] << " acc_s: " << accumulated_s[i] << " kappa: " << kappas[i] << " dkappas: " << dkappas[i] << std::endl; // heading 是弧度单位
}
for (size_t i = 0; i < headings.size(); i++)
{
TrajectoryPoint trajectory_pt;
trajectory_pt.x = xy_points[i].first;
trajectory_pt.y = xy_points[i].second;
trajectory_pt.v = 2.0;
trajectory_pt.a = 0.0;
trajectory_pt.heading = headings[i];
trajectory_pt.kappa = kappas[i];
planning_published_trajectory.trajectory_points.push_back(trajectory_pt);
this_pose_stamped.header.frame_id = "gps";
this_pose_stamped.header.stamp = this->get_clock()->now();
this_pose_stamped.pose.position.x = xy_points[i].first;
this_pose_stamped.pose.position.y = xy_points[i].second;
this_pose_stamped.pose.position.z = 0;
this_pose_stamped.pose.orientation.x = 0;
this_pose_stamped.pose.orientation.y = 0;
this_pose_stamped.pose.orientation.z = 0;
this_pose_stamped.pose.orientation.w = 0; // 这里实际上是放的frenet坐标系的S
global_path.poses.push_back(this_pose_stamped);
global_path.header.frame_id = "gps";
}
goal_point = planning_published_trajectory.trajectory_points.back();
}
StanelyAndPIDController::~StanelyAndPIDController(){}
double StanelyAndPIDController::PointDistance(const TrajectoryPoint& point, const double x, const double y)
{
const double dx = point.x - x;
const double dy = point.y - y;
return sqrt(dx * dx + dy * dy);
}
void StanelyAndPIDController::OdomCallback(nav_msgs::msg::Odometry::SharedPtr msg)
{
if (!first_record_)
{
first_record_ = true;
}
RCLCPP_INFO(LOGGER, "I hear localization");
vehicle_state_.vx = msg->twist.twist.linear.x;
vehicle_state_.vy = msg->twist.twist.linear.y;
tf2::Quaternion quat_tf;
tf2::convert(msg->pose.pose.orientation, quat_tf);
tf2::Matrix3x3(quat_tf).getRPY(vehicle_state_.roll, vehicle_state_.pitch, vehicle_state_.yaw);
vehicle_state_.heading = vehicle_state_.yaw;
// 将位置转移到前车轮的中心点
vehicle_state_.x = msg->pose.pose.position.x + std::cos(vehicle_state_.heading) * 0.5 * car_length_;
vehicle_state_.y = msg->pose.pose.position.y + std::sin(vehicle_state_.heading) * 0.5 * wheelbase_;
vehicle_state_.velocity = std::sqrt(msg->twist.twist.linear.x * msg->twist.twist.linear.x + msg->twist.twist.linear.y * msg->twist.twist.linear.y);
vehicle_state_.angular_velocity = std::sqrt(msg->twist.twist.angular.x * msg->twist.twist.angular.x + msg->twist.twist.angular.y * msg->twist.twist.angular.y);
vehicle_state_.acceleration = 0.0;
/* 将收到的定位信息发布出来,在rviz里显示历史轨迹 */
history_path.header.stamp = this->get_clock()->now();
history_path.header.frame_id = "gps";
history_path_points.header.stamp = this->get_clock()->now();
history_path_points.header.frame_id = "gps";
history_path_points.pose.position.x = vehicle_state_.x;
history_path_points.pose.position.y = vehicle_state_.y;
history_path_points.pose.position.z = 0;
history_path_points.pose.orientation = msg->pose.pose.orientation;
history_path.poses.push_back(history_path_points);
if (history_path.poses.size() > 2000)
{
vector<geometry_msgs::msg::PoseStamped>::iterator k = history_path.poses.begin();
history_path.poses.erase(k);
}
history_path_visualization_publisher->publish(history_path);
// 将世界坐标系和车辆坐标系的位置关系广播出来
geometry_msgs::msg::TransformStamped transformStamped;
transformStamped.header.stamp = this->get_clock()->now();
transformStamped.header.frame_id = "gps";
transformStamped.child_frame_id = "vehicle_odometry";
transformStamped.transform.translation.x = msg->pose.pose.position.x;
transformStamped.transform.translation.y = msg->pose.pose.position.y;
transformStamped.transform.translation.z = msg->pose.pose.position.z;
transformStamped.transform.rotation.x = quat_tf.x();
transformStamped.transform.rotation.y = quat_tf.y();
transformStamped.transform.rotation.z = quat_tf.z();
transformStamped.transform.rotation.w = quat_tf.w();
tf_broadcaster_gps_vehicle->sendTransform(transformStamped);
}
/**
* @description: 车辆控制核心函数
* @return {*}
*/
void StanelyAndPIDController::VehicleControllerIterationCallback()
{
if(this->first_record_)
{
if (this->PointDistance(this->goal_point, this->vehicle_state_.x, this->vehicle_state_.y) < 0.5)
{
V_set_ = 0;
}
stanely_controller_lateral->ComputeControlCmd(this->vehicle_state_, this->planning_published_trajectory, cmd);
double ego_speed = std::sqrt(this->vehicle_state_.vx * this->vehicle_state_.vx + this->vehicle_state_.vy * this->vehicle_state_.vy);
double v_err = V_set_ - ego_speed; // 速度误差
cout << "v_err: " << v_err << endl;
double acceleration_cmd = pid_controller_longitudinal->Control(v_err, 0.01);
control_cmd.header.stamp = this->get_clock()->now();
control_cmd.acceleration_pct = acceleration_cmd;
control_cmd.target_gear = lgsvl_msgs::msg::VehicleControlData::GEAR_DRIVE;
control_cmd.target_wheel_angle = cmd.steer_target;
vehicle_control_publisher->publish(control_cmd);
}
}
void StanelyAndPIDController::GlobalPathPublushCallback()
{
global_path.header.stamp = this->get_clock()->now();
global_path_publisher_->publish(global_path);
}
int main(int argc, char **argv)
{
RCLCPP_INFO(LOGGER, "Initializa Node~");
rclcpp::init(argc, argv);
auto n = std::make_shared<StanelyAndPIDController>();
rclcpp::spin(n);
rclcpp::shutdown();
return 0;
}common.h
/*
* @Author: HaiChen
* @LastEditTime: 2025-02-07 13:09:03
* @Description: 车辆及路径参数
*/
#ifndef COMMON_H
#define COMMON_H
#include <fstream>
#include <iostream>
#include <string>
#include <lgsvl_msgs/msg/vehicle_control_data.hpp>
#include <nav_msgs/msg/odometry.hpp>
#include <std_msgs/msg/header.hpp>
#include <vector>
#include "map.h"
#include "reference_line.h"
#include "rclcpp/rclcpp.hpp"
// #include <ros/ros.h>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2/transform_datatypes.h>
#include <tf2_geometry_msgs/tf2_geometry_msgs.h>
#include <tf2/convert.h>
// #include "tf/tf.h"
struct VehicleState
{
double x;
double y;
double heading; // 车辆朝向
double kappa; // 曲率(切线斜率)
double velocity; // 速度
double angular_velocity; // 角速度
double acceleration; // 加速度
// 规划起点
double planning_init_x;
double planning_init_y;
double roll;
double pitch;
double yaw;
double target_curv; // 期望点的曲率
double vx;
double vy;
double v;
// added
double start_point_x;
double start_point_y;
double relative_x = 0;
double relative_y = 0;
double relative_distance = 0;
double start_heading;
};
struct TrajectoryPoint
{
double x;
double y;
double heading;
double kappa;
double v;
double a;
};
struct TrajectoryData
{
std::vector<TrajectoryPoint> trajectory_points;
};
struct LateralControlError
{
double lateral_error;
double heading_error;
double lateral_error_rate;
double heading_error_rate;
};
struct ControlCmd
{
double steer_target;
double acc;
};
typedef std::shared_ptr<LateralControlError> LateralControlErrorPtr;
#endif由于水平有限以上内容仅是自己学习理解过程,各位读者朋友发现问题之处还请帮忙提出,不胜感激。
如果觉得文章对你有帮助的话请点个赞吧,有问题还请指正,共同交流,共同进步!

分享最新的 NVIDIA AI Software 资源以及活动/会议信息,精选收录AI相关技术内容,欢迎大家加入社区并参与讨论。
更多推荐

 28
28 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)