
L4级自动驾驶仿真工具链-RealSim:地图编辑器
让数据真正闭环, 自动驾驶和机器人数据闭环工具链, 杭州千岑智能科技有限公司-RealSim,地图编辑器支持编辑矿山路网、作业区、挡墙等,路口链接关系编辑,支持OpenDrvie,Apollo地图。
·
让数据真正闭环, 自动驾驶和机器人数据闭环工具链, 杭州千岑智能科技有限公司-RealSim。
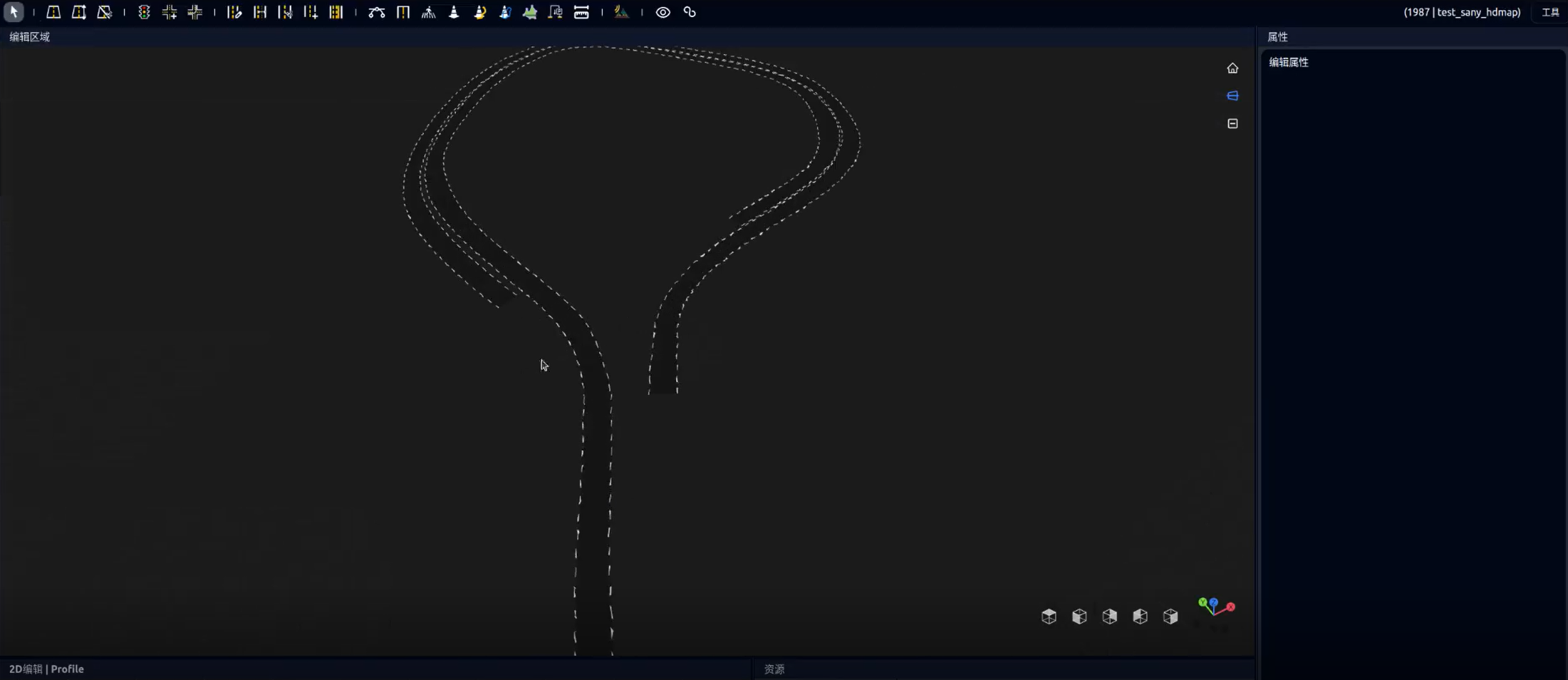
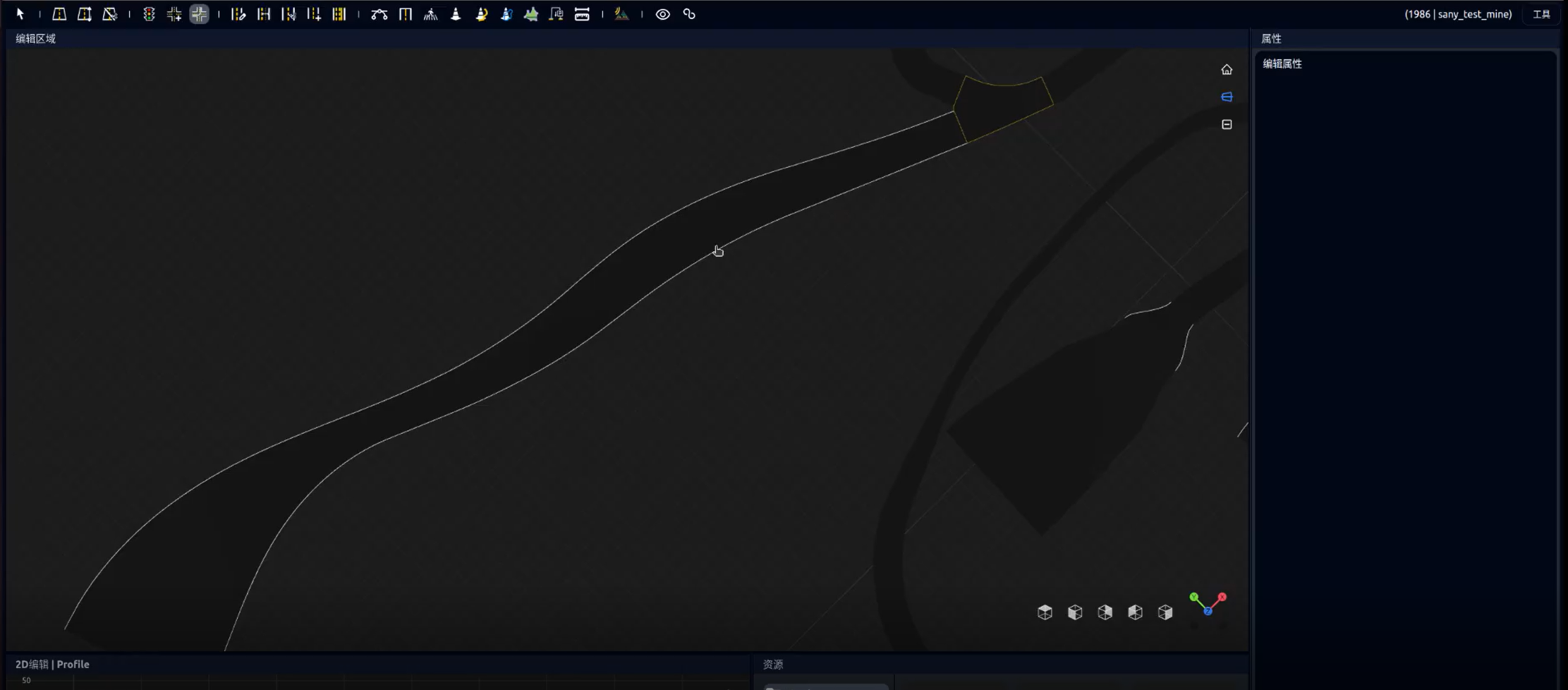
①路网预览

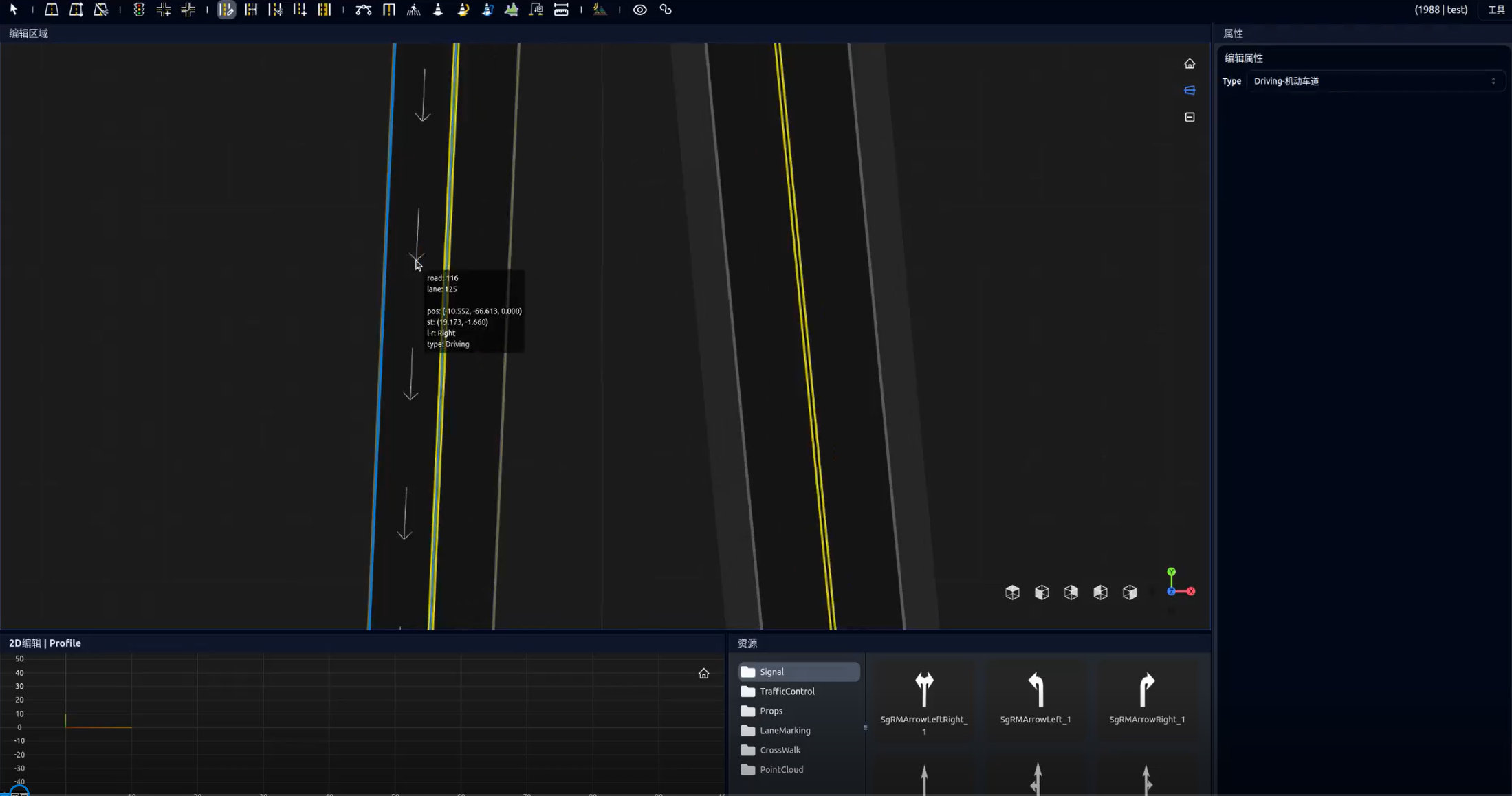
②车道编辑

③车道线编辑
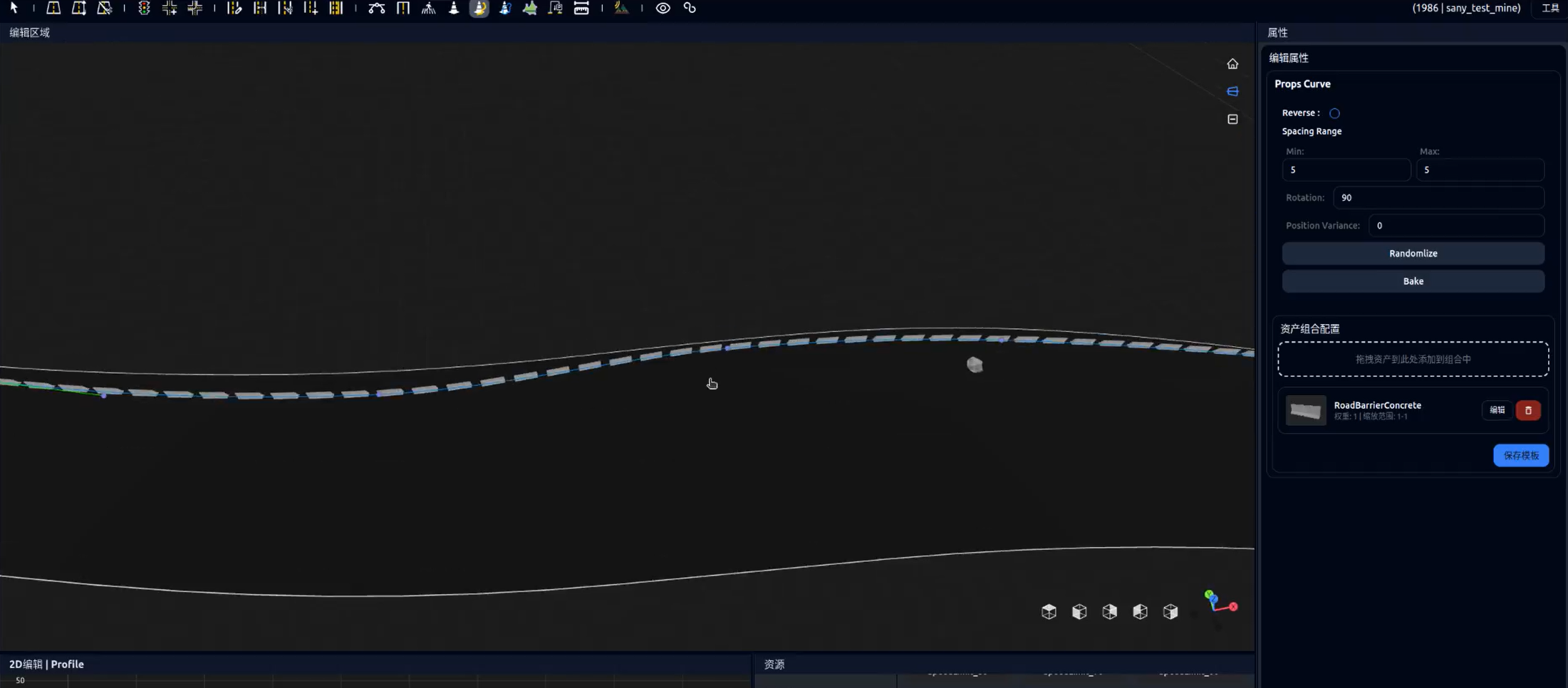
④矿山作业区及挡墙编辑
作业区
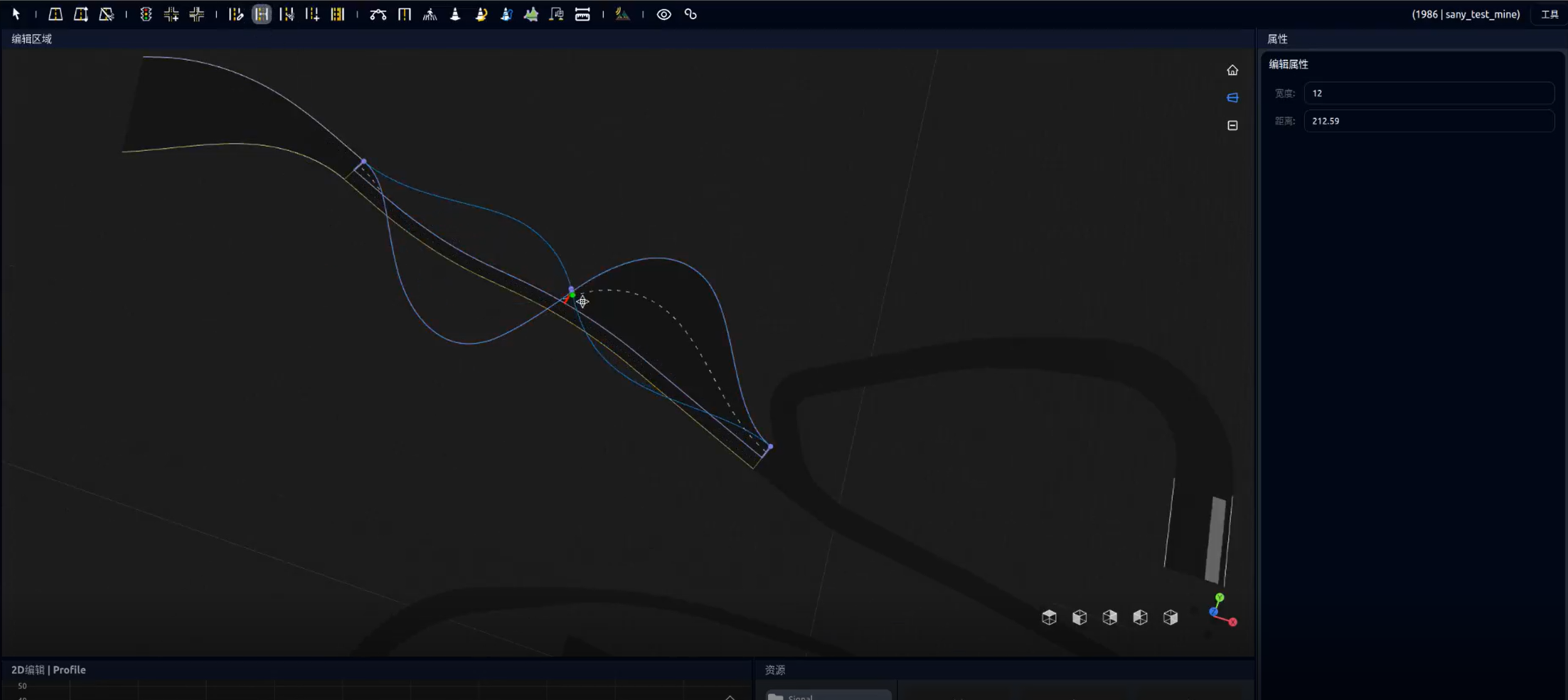
车道由窄变多

挡墙编辑
⑤路口链接关系编辑

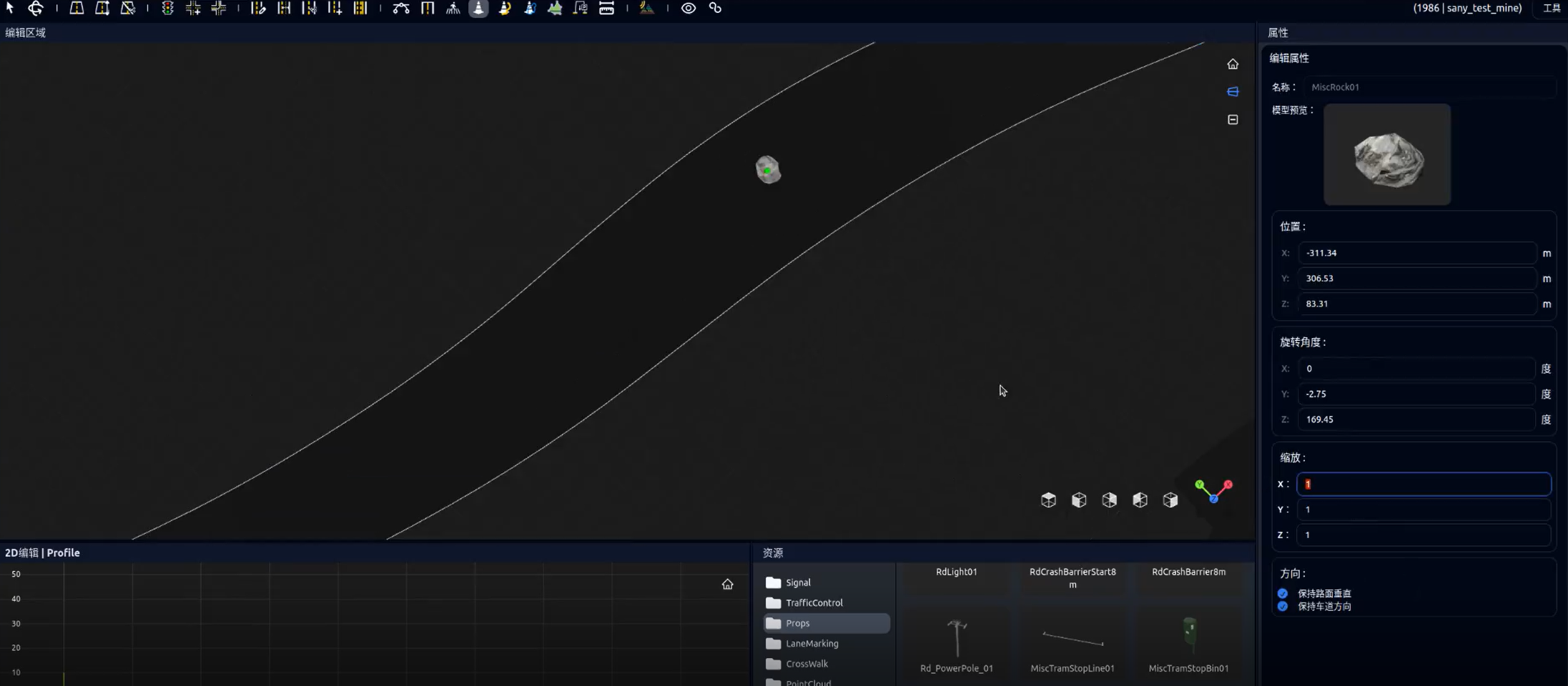
⑥路面障碍物-落石编辑
⑦车道高低起伏编辑

分享最新的 NVIDIA AI Software 资源以及活动/会议信息,精选收录AI相关技术内容,欢迎大家加入社区并参与讨论。
更多推荐


 1
1 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)