
为什么说自动驾驶量产离不开BEV感知?
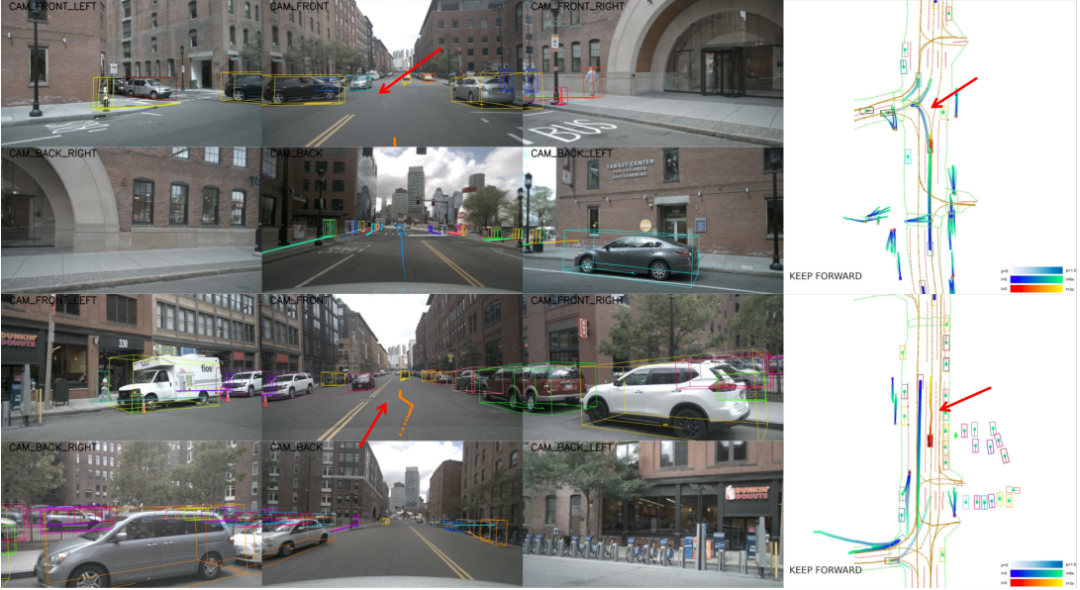
21年下半年开始,BEV感知席卷了整个自动驾驶感知领域!从动态感知代表作BEVDet/BEVFormer,到静态感知MapTR,再到端到端自动驾驶UniAD。所有里程碑算法的背后都是BEV的基座!BEV感知相当于给自动驾驶开启了“上帝视角”,能够让车辆无遮挡的“看清”道路上的实况信息,在BEV视角下统一完成感知和预测任务。不仅仅是感知模块,甚至基于BEV进行的规划决策也是学术界研究的方向。而在20
21年下半年开始,BEV感知席卷了整个自动驾驶感知领域!从动态感知代表作BEVDet/BEVFormer,到静态感知MapTR,再到端到端自动驾驶UniAD。所有里程碑算法的背后都是BEV的基座!BEV感知相当于给自动驾驶开启了“上帝视角”,能够让车辆无遮挡的“看清”道路上的实况信息,在BEV视角下统一完成感知和预测任务。不仅仅是感知模块,甚至基于BEV进行的规划决策也是学术界研究的方向。
而在2024年以后想要入行的同学,BEV几乎可以说是必问的基础。许多同学在刚学习时往往不知道如何下手,大多数人不清楚网络设计、空间转换、后处理解析也是一头雾水、如何选择损失函数与模型方案也难倒了一大批人!
大额八折优惠!扫码加入学习
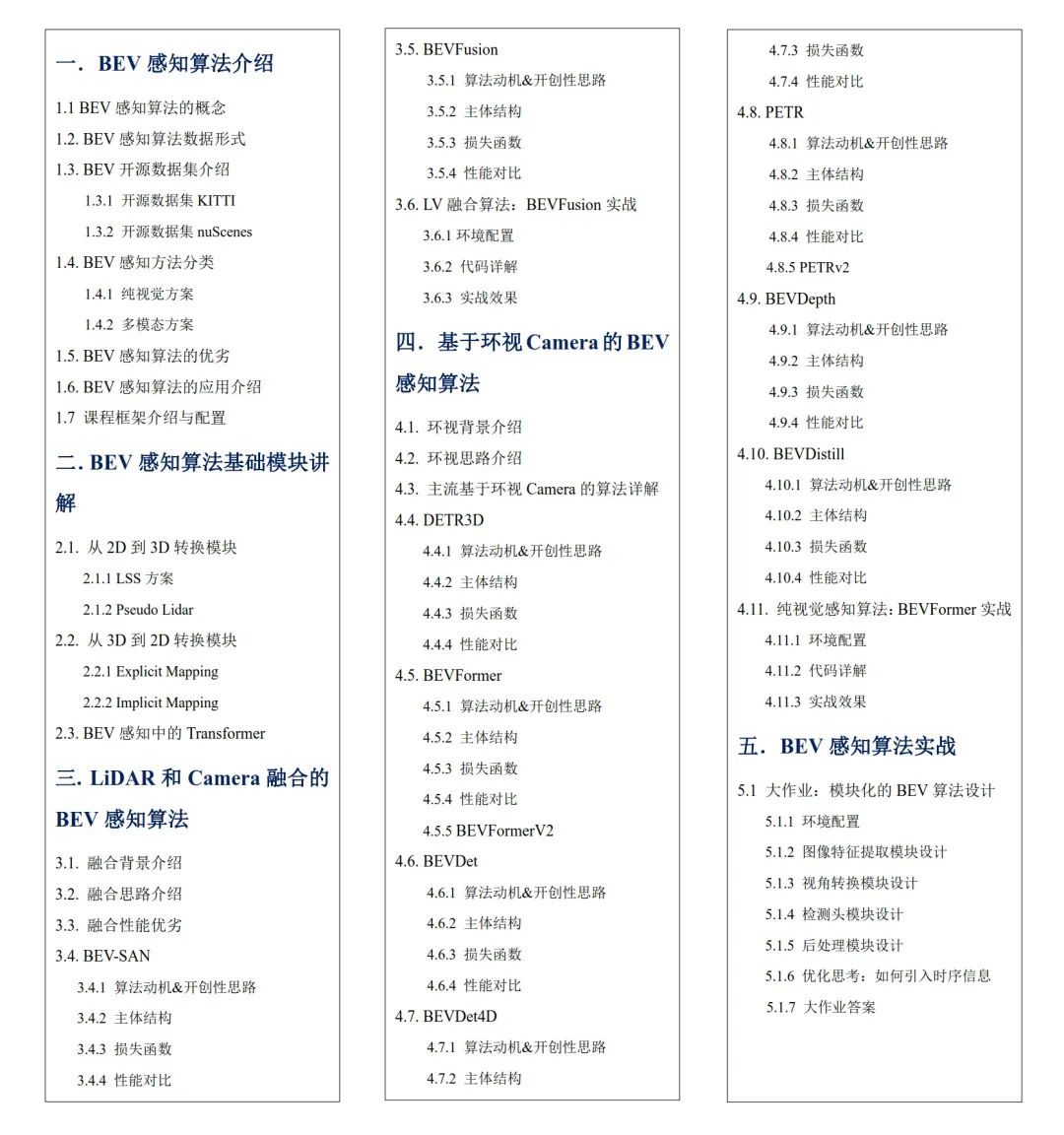
课程大纲
在深入调研大家的需求后,我们选择了行业几乎所有主流BEV算法(纯视觉+多传感器融合方案),从0到1为大家详细展开网络结构设计、算法优化、实战等方方面面,内容非常详细!最适合刚入门的小白以及需要在业务上优化算法的同学,大纲如下:
主讲老师
柒柒,自动驾驶之心前沿技术研究团队成员,上海交通大学在读博士,深耕自动驾驶算法领域多年。在CVPR,ECCV,ACM MM,TCSVT,TITS等计算机视觉、智能交通领域发表多篇论文,在自动驾驶算法设计、模型优化部署方面有着丰富的落地经验。
本课程适合人群
计算机视觉与自动驾驶感知相关研究方向的本科/硕士/博士;
自动驾驶2D/3D感知相关算法工程人员;
想要转入自动驾驶与BEV感知算法的小伙伴;
本课程需要具备的基础
具有一定的python和pyTorch基础,熟悉深度学习常用的一些基础算法;
对BEV感知的应用和基础方案有一定了解;
一定的线性代数和矩阵论基础;
电脑需要自带GPU,能够通过CUDA加速(显存至少12GB);
学后收获
对BEV感知的所有主流方案有着深入理解,在模型设计和优化上有较大提升;
学习到自动驾驶算法设计思想,从根本上学会如何设计一个有效的BEV检测框架;
能够精通自动驾驶通用算法,理论实践并重,无论是学术界抑或工业界都能直接复用;
学完本课程能够达到1年左右的自动驾驶工程师水平;
能够结识许多行业从业人员与学习合作伙伴!
开课时间与学习方式
2023年4月20日正式开始学习之路,历经两个月,离线视频授课。主讲老师在微信学习群内答疑,对课程中的算法、代码、环境配置等问题一一解惑!
课程咨询
大额八折优惠!扫码加入学习



NVIDIA官方入驻,分享最新的官方资源以及活动/会议信息,精选收录AI相关技术内容,欢迎大家加入社区并参与讨论。
更多推荐

 0
0 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)